ОРИЕНТАЦИЯ И СТАБИЛИЗАЦИЯ
В сообщениях о полетах космонавтов можно прочесть о ручном управлении космическим кораблем и об автоматической системе его ориентации. Что такое ориентация и в какой мере можно осуществлять управление орбитальным кораблем? Как известно, заданную траекторию при движения орбитального тела сохраняет только центр масс (мы бы сказали центр тяжести, но нельзя забывать, что орбитальный корабль не имеет тяжести - он невесом), а весь корабль под действием различных возмущающих моментов может буквально кувыркаться относительно системы координат, связанной с центром масс. Чтобы корпус корабля был неподвижен относительно своего центра масс, необходимо его стабилизировать в нужном положении. Управление кораблем или ОКС - это не только стабилизация его относительно центра масс, но и ориентация по отношению к системе координат, не связанной с ОКС, например по отношению к Солнцу. Выбор ориентации ОКС зависит от назначения станции. Геофизические приборы, например установленные на ОКС, потребуют ориентации на те или иные участки земной поверхности. Для проведения астрономических наблюдений Солнца, Луны, планет и звезд необходимо будет соответствующим образом ориентировать телескопы или всю станцию. Солнечные коллекторы системы энергоснабжения должны быть постоянно направлены на Солнце. Определенная ориентация необходима и для различных антенных устройств. При выполнении различных научных экспериментов наверняка потребуется изменение пространственной ориентации всей станции в целом, так как не всегда, конечно, удастся ограничиться изменением ориентации самих приборов. При этом нужно будет не только в любое время по желанию экипажа переориентировать станцию, но и автоматически поддерживать ее в любом заданном положении, т.е. стабилизировать. Требования к качеству стабилизации могут быть достаточно велики. К примеру, некоторые астрономические измерения требуют наводки телескопа с точностью до 1", а иногда и десятых долей угловой секунды. Очевидно, что точность стабилизации астрономической ОКС должна быть при этом не меньше. Так как энергетические ресурсы на борту довольно ограничены, затраты энергии на автоматическую стабилизацию должны быть минимальными. Если придание станции требуемого пространственного положения может быть осуществлено сравнительно просто, то задача обеспечения устойчивости станции в заданном положении оказывается более сложной. Действительно, для изменения ориентации ОКС достаточно кратковременно приложить соответствующий разворачивающий момент. Сохранению же полученной ориентации будут препятствовать различного рода регулярные и нерегулярные возмущения, компенсация которых и составляет задачу стабилизации. Очевидно, что, имея надежную систему стабилизации, нетрудно будет с ее же помощью осуществлять управление ориентацией ОКС. Система стабилизации ОКС должна работать непрерывно, быть очень чувствительной к возмущающим моментам, которые могут иметь самое разнообразное происхождение, величину и продолжительность действия. Количественно возмущения, воздействующие на ОКС, оцениваются величиной импульса момента (в кгм•сек), который подсчитывается как произведение возмущающего момента (в кгм) на время его действия (в сек). Величина возмущающих моментов, приводящих ОКС во вращение вокруг ее центра масс, может изменяться в широком диапазоне. Источники возмущающих моментов могут находиться как внутри ОКС, так и вне ее. Причин возможных внешних возмущений - десятки. Это и силы аэродинамического сопротивления и гравитационное и магнитное поля Земли, и давление солнечной радиации, и столкновение с метеорами, возможные толчки и удары при встрече с другими космическими аппаратами. Сразу же отметим, что рациональным проектированием станции некоторые внешние воздействия, такие, например, как аэродинамические силы или световое давление Солнца, можно из вредных превратить в полезные, т.е. из источников возмущений в стабилизирующие факторы. Внутренние возмущения могут быть вызваны только работой подвижных частей оборудования, но и перемещениями членов экипажа. Неизбежность таких возмущений очевидна - трудно ведь представить себе ученых-космонавтов, свобода движения и перемещения которых находится в жестких ограничивающих рамках. Расчеты показывают, что в результате перемещений членов экипажа ОКС величина возмущающего момента может изменяться от 2 до 35 кгм, что при времени действия от 0,5 до 10 сек создает импульсы момента от 1 до 350 кгм•сек [17]. Угловые скорости, сообщаемые при этом аппарату в различных направлениях (они зависят от конструкции станции), могут составить от 0,05 до 2 град/сек. А как же быть в этом случае с наводкой астрономических приборов, помехой для которых, как считают, могут быть даже дыхательные движения и биение пульса человека? Здесь уже не поможет даже полная неподвижность космонавтов - придется вынести телескопы на специально ориентируемую платформу, либо вообще разместить их на отдельном самостоятельно стабилизирующемся необитаемом спутнике вблизи ОКС. Внешние возмущения естественного происхождения - аэродинамического, гравитационного или магнитного - характеризуются, с одной стороны, весьма малыми значениями возмущающего момента, с другой стороны, довольно большой продолжительностью их действия. Например, гравитационное поле Земли будет действовать на ОКС практически непрерывно, хотя возникающий при этом возмущающий момент будет всего лишь порядка 0,05 кгм. Таким образом, если этот момент не компенсировать постоянно, то импульс момента может быть очень большим, а угловые скорости вращения будут расти неограниченно и станция может раскрутиться до большой скорости. Возмущающие моменты, которые могут возникнуть при швартовке к борту ОКС межпланетного корабля или ракеты с Земли, наоборот, отличаются большой величиной (до 1000 кгм и более), нет они кратковременны. Импульсы момента будут все-таки значительными - до 500 кгм•сек. Какие же существуют методы стабилизации пространственного положения ОКС? Наиболее просто можно было бы придать устойчивое положение орбитальной станции, сообщив ей постоянное вращательное движение вокруг одной из ее осей. Такой способ стабилизации требует вполне определенной конфигурации ОКС - момент инерции станции вокруг оси ее вращения должен быть либо намного больше, либо намного меньше моментов инерции относительно двух других осей. Первому условию соответствуют станции, имеющие форму диска, тороида или креста, вращающихся в своей плоскости; второму условию отвечает цилиндрическая конфигурация станции, вращающейся вокруг своей продольной оси (этот случай напоминает стабилизацию артиллерийского снаряда). Вращение ОКС, имеющей в плане форму диска или обода, помимо целей стабилизации, может служить и для создания на станции искусственной гравитации и в этом смысле представляется весьма удачным решением проблемы. Этот способ, однако, трудно совместить с проведением с борта ОКС большого числа геофизических и астрономических измерений. Недопустимость при выполнении таких измерений вращения всей станции в целом заставляет изыскивать другие методы стабилизации. С точки зрения происхождения энергии, используемой для создания восстанавливающих моментов, методы стабилизации невращающейся станции можно разделить на пассивные и активные. В пассивных методах компенсация возмущающих моментов осуществляется за счет энергии, приходящей извне. Источниками компенсирующих моментов могут быть либо внешние вращательные моменты как следствие воздействия все тех же потенциальных полей Земли - гравитационного или магнитного, либо внешние направленные силы (стабилизация аэродинамическим сопротивлением или световым давлением). В первом случае необходимые компенсирующие моменты могут возникнуть при прохождении ОКС какого-либо потенциального поля Земли, если ОКС снабжена соответствующим диполем, ось которого всегда стремится совместиться с направлением наибольшего изменения напряженности поля. Если же стабилизация осуществляется внешней направленной силой, то главное требование состоит в том, чтобы центр приложения этой силы находился на определенном расстоянии от центра масс спутника. Идея использования гравитационных сил для стабилизации ОКС возникла при изучении видимых колебаний Луны вокруг ее центра тяжести (либрации). Оказалось, что Луна стабилизирована относительно Земли довольно точно за счет весьма небольшого отличия ее формы от сферической. Анализ влияния гравитационного поля на спутники Земли показывает, что положение ОКС будет устойчивым, если ось минимального момента инерции направить по вертикали к поверхности Земли, а ось максимального момента расположить перпендикулярно плоскости орбиты станции. Интересно, что космическая станция, выполненная по форме в виде гантели, т.е. обладающая распределением масс, характерным для гравитационного диполя, будет самостабилизироваться в поле действия силы тяжести Земли. На орбите такая станция будет всегда стремиться занять положение, при котором продольная ось «гантели» (диполя) будет направлена к центру Земли, а поперечная - по перпендикуляру к плоскости орбиты. Правда, при таком способе стабилизации процесс ее будет идти очень медленно. Кроме того, вращение станции вокруг продольной оси «гантели», конечно, контролироваться не будет. Для компенсации накренений вокруг этой оси, т.е. для обеспечения полной трехосевой устойчивости, необходимо будет иметь дополнительные устройства. Возможности стабилизации ОКС с использованием магнитного поля, при котором роль диполя должна играть катушка с электрообмоткой, ограничены еще меньшими значениями располагаемых восстанавливающих моментов. К тому же такой способ стабилизации применим для сравнительно узкого класса орбит, определяемого формой земного магнитного поля. В качестве компенсирующего фактора в пассивных стабилизирующих системах можно использовать аэродинамическое сопротивление конструкции ОКС. Для обеспечения устойчивости центр приложения результирующей силы давления должен лежать позади центра масс спутника (смотря по направлению движения), причем величина восстанавливающего эффекта тем больше, чем больше площадь поверхности ОКС и расстояние между центром масс и центром давления. Естественно, что аэродинамическая стабилизация применима лишь до определенных высот орбиты. Предельной высотой считают 500 км [24], где давление воздуха меньше 1,5*10-8г/см2. Возможности стабилизации с помощью светового давления, конечно, еще меньше, поскольку давление солнечного излучения вблизи Земли весьма незначительно. Расчеты показывают, что для компенсации небольшого возмущения за счет светового давления потребуется не менее получаса. Тем не менее считается, что такой способ может найти применение для компенсации моментов от вращающихся в процессе работы деталей оборудования и приборов. Практически способы стабилизации с помощью пассивных методов будут, по-видимому, использованы при создании вспомогательных устройств; дополняющих работу других, более эффективных стабилизирующих систем ОКС. Такие системы могут использовать лишь активные методы стабилизации, в которых восстанавливающий момент создается за счет энергии, получаемой или запасенной на борту ОКС. К таким методам относится стабилизация с помощью вращающихся маховиков и стабилизация реактивными соплами. В системе стабилизации маховиками, предложенной для космических аппаратов еще К.Э.Циолковским, используется инерционное свойство вращающегося тела сохранять неизменной свою ориентацию. Известно, что, чем выше угловая скорость вращения тела и чем больше его момент инерции, тем устойчивее положение этого тела в пространстве. Таким образом, в данной системе восстанавливающим фактором служит момент вращения маховика. Раскрутка и поддержание заданной скорости вращения маховика должны производиться электромоторами небольшой мощности, питающимися от бортовой системы энергоснабжения. Три таких маховика с осями, Расположенными во взаимно-перпендикулярных направлениях, обеспечивают полную трехосевую стабилизацию спутника по тангажу, рысканию и крену (рис. 14).
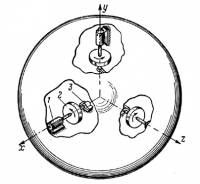
Рис. 14. Стабилизация с помощью вращающихся маховиков: 1 - электродвигатель; 2 - маховик; 3 - подшипник
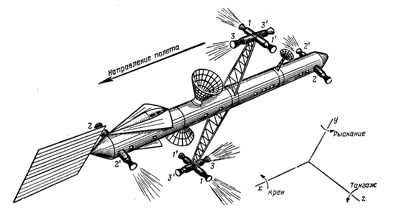
Для усовершенствования системы можно взять три отдельных маховика, каждый из которых создается восстанавливающий момент только вокруг одной оси, а один сферический маховик с асинхронным электродвигателем, имеющим три взаимно-ортогональные обмотки. Сферическому маховику не нужны подшипники: подвеску можно осуществить либо с помощью магнитного или электростатического поля, либо на газовой подушке. Но возможности системы с маховиками по максимуму величины восстанавливающего момента далеко не безграничны и определяются предельной скоростью вращения маховиков. Поэтому реакция такой системы стабилизации на очень большие возмущения может оказаться недостаточной. Активная система стабилизации реактивными соплами является наиболее эффективной и уже используется на практике. Восстанавливающий момент в этой системе возникает при выбросе массы рабочего тела из сопла небольшого реактивного двигателя, ось которого не проходит через центр масс космического корабля или ОКС. Восстанавливающий момент зависит от скорости истечения и массового расхода рабочего тела, а также от размера плеча, на котором приложена сила тяги двигателя. Рабочим телом могут служить как обычные продукты сгорания химического топлива, так и просто пар или воздух. Конечно, пар или воздух дают относительно низкие скорости истечения, поэтому расход и запасы на борту таких однокомпонентных рабочих тел будут довольно значительными. Вообще, учитывая необходимость в расходе рабочего тела, такие системы можно считать пригодными лишь для кратковременного действия. С другой стороны, система с двигателями может давать очень большие величины восстанавливающих моментов и довольно быстро реагировать на неожиданные импульсы возмущающих моментов. Поэтому для длительно существующих ОКС такая система будет очень удобной, придется лишь периодически пополнять запасы рабочего тела, транспортируя его с Земли. Для стабилизирующей системы длительного действия можно применить плазменные или ионные двигатели, способные развивать высокие скорости истечения при небольших расходах рабочего тела. Для таких двигателей нужно будет иметь дополнительные ресурсы электроэнергии на борту ОКС. Как будет осуществляться стабилизация ОКС с помощью двигателей? Для полной стабилизации по тангажу, рысканию и крену необходимо иметь по крайней мере шесть пар реактивных двигателей, расположенных так, как показано на рис. 15, При появлении какого-либо возмущения включается определенная пара двигателей, создающая момент, компенсирующий возмущение. Например, если аппарат почему-либо начинает накреняться вокруг оси х в направлении, указанном стрелкой, то включится пара двигателей 1-1. При действии момента в противоположном направлении работают двигатели 1'-1'. Аналогично компенсируются моменты вокруг осей y и z. При одновременном возникновении возмущений вокруг всех трех осей запускаются три соответствующие пары двигателей контроля. Так, если действуют сразу три момента вращения, изображенные на рис. 15 стрелками, то необходимо включить пары двигателей 1-1, 2' -2' и 3-3.

Рис. 15. Схема стабилизации ОКС с помощью реактивных сопел: 1-1' - по крену; 2-2' - по рысканью; 3-3' - по тангажу
Приведем некоторые конкретные данные о подобной системе, предназначаемой, по одному из иностранных проектов, для стабилизации 12-тонной ОКС. Каждый из реактивных двигателей работает на химическом разложении однокомпонентного жидкого топлива - перекиси водорода - и развивает тягу 10 кг. Потребный расход топлива в среднем около 12 кг перекиси в день при обычных возмущениях и около 36 кг в день при компенсации толчков в период швартовки прибывающих ракет. Чувствительность системы по тангажу и рысканию ±1,2° и по крену ±3°. Общий вес системы оценивается примерно в 300 кг [18]. Мы рассказали о различных способах стабилизации орбитальных космических аппаратов. Какому же из них можно отдать предпочтение при создании ОКС? Пока еще нельзя ответить на этот вопрос совершенно определенно. Видимо, ОКС обязательно будет иметь активную систему стабилизации, которая будет быстро и точно реагировать на любые внешние или внутренние возмущения, а также позволит быстро и надежно изменять ориентацию станции по команде оператора. Активная система будет дополнена пассивными методами стабилизации, если конструкторы ОКС заранее позаботятся о рациональном распределении масс и надлежащем выборе геометрической формы станции. В целом система стабилизации ОКС представит собой большой комплекс разнообразных технических устройств, в который, кроме исполнительных органов - реактивных сопел, маховиков, катушек с электротоком и др., - войдут многочисленные датчики ориентации и специальные счетно-решающие устройства. Точность сигналов, вырабатываемых датчиками, во многом определяет эффективность всей стабилизирующей системы. В качестве датчиков ориентации можно использовать приборы, построенные на самых различных принципах: скоростные высокочувствительные гироскопы для регистрации возмущающих моментов вращения, фотоэлементы слежения за Солнцем и звездами, магнитометры для определения местного вектора магнитного поля, оптические или инфракрасные приборы слежения за горизонтом, маятниковые устройства и др.
astronaut.ru
|