| Статистика |

Онлайн всего: 1 Гостей: 1 Пользователей: 0
|
|
Одноосноя гравитационная стабилизации МКС
О возможности реализации пассивной одноосной гравитационной стабилизации Международной космической станции И. М. Сидоров, Г. В. Веселова
Рассматривается случай, когда Международная космическая станция оснащена тросовой системой. Анализируются две схемы подвеса троса. В каждой из них точка подвеса может перемещаться и таким образом менять момент силы, действующий на станцию со стороны троса. Предложены алгоритмы управления положением точки подвеса троса. Проведённое моделирование показывает, что предложенные алгоритмы позволяют реализовать одноосную гравитационную стабилизацию Международной космической станции.
On the possibility of the realization of the passive uniaxial gravitational stabilization of the International Space Station I. M. Sidorov, G. V. Veselova We consider a variant in which the ISS is equipped with a tether system. Two schemes of suspension tether are considered. Each variant allows to move a point of suspension and thus change the moment of the force acting for the station from the tether. Algorithms for controlling the position of the point of suspension tether are devoted. The simulation shows that the proposed control algorithms allow to realize the uniaxial gravitational stabilization of the International Space Station. © Федеральное государственное бюджетное учреждение науки Институт космических исследований Российской академии наук (ИКИ РАН), 2013
Введение
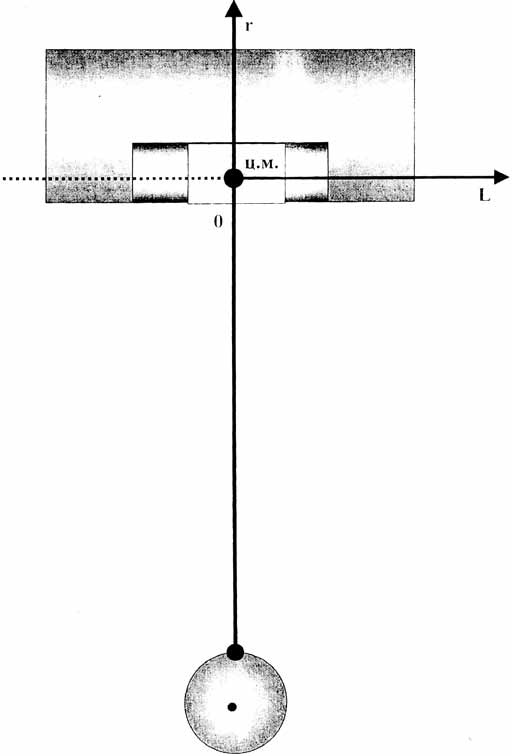
В работах [Сидоров, Веселова, 2013а, б] были предложены алгоритмы управления процессом развёртывания троса — гибкой связи блока-терминала с Международной космической станцией (МКС) с учётом возникающих в процессе развёртывания продольных колебаний троса и колебаний в плоскостях стабилизации. Оснащение МКС тросовой системой приводит к появлению новой системы — орбитальной тросовой системы (ОТС) с новыми возможностями, в частности, для МКС. Одной из наиболее сложных проблем, решение которой необходимо для функционирования орбитальной станции, является си- стема угловой стабилизации. В штатном режиме ориентация обеспечивается установленными на орбитальной станции системами гиродинов. Оснащение орбитальной станции тросовой системой позволит создать альтернативную систему угловой стабилизации. Натянутый трос создаёт опорную ось в пространстве. Наличие такой оси даёт возможность выполнять необходимые угловые раз- вороты орбитальной станции, а также решать задачи угловой стабилизации. Новая система МКС – гибкая связь – блок-терминал позволяет реализовать пассивную одноосную гравитационную стабилизацию МКС, а также становится возможной высокоточная активная трёхосная стабилизация. В настоящей работе рассматривается первая из этих возможностей. 1. Принципиальная схема орбитальной тросовой системы на базе Международной космической станции. Предварительные параметры входящих в систему блоков Принципиальная схема системы МКС – блок-терминал с гибкой связью с МКС изображена на рис. 1.
В качестве гибкой связи используется трос, изготовленный из композитного материала (торнела или кевлара) в виде ленты шириной 5…10 мм и сечением ~1 мм2. Такой выбор существенно уменьшает вероятность повреждения троса микрометеоритами. Длина троса — 5 км, вес ~7 кг. При этих параметрах запас прочности троса составляет 1000 единиц. Некоторые возможные схемы подвески троса для решения задачи стабилизации приведены ниже.

Рис. 1. Схема подвеса груза-терминала к МКС
Развёртывание и свёртывание троса [Сидоров, Веселова, 2013а, б], его выпуск и подтягивание осуществляется с помощью электропривода, установленного на МКС. Мощность электродвигателя привода — ~1 Вт. Привод должен обеспечивать управляемую скорость вращения с точностью ~1 см/с. Для реализации одноосной гравитационной стабилизации необходимо перемещать электропривод, для чего должен быть предусмотрен соответствующий механизм перемещения в блоке электропривода. Терминальный блок представляет собой груз массой ~20 кг. На рис. 1 груз-терминал изображён в виде шара. Для наблюдения за движением груза используется телевизионная камера и позиционно- чувствительный оптический датчик или лазерный дальномер, установленные на МКС. Терминальный блок крепится к тросу с помощью мягкой пружины. Пружина должна обеспечивать натяжение, компенсирующее динамическую нагрузку троса — ~3…5 г/см. Установленный в терминальном блоке датчик натяжения должен измерять растяжение пружины с точностью до 1 мм; эта информация передаётся в блок привода на МКС. Для выталкивания груза-терминала необходимо устройство, которое отталкивало бы груз от МКС, — например, пружинный толкатель.
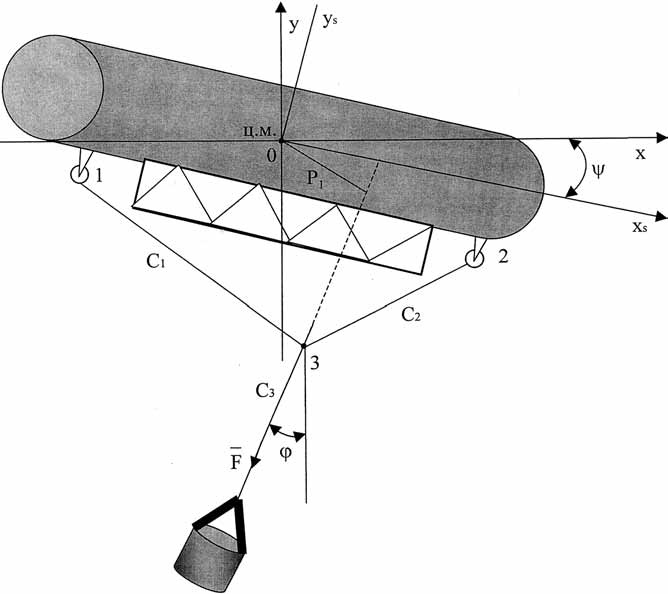
В процессе развёртывания троса и при дальнейшем движении единственным управляющим органом является привод, установленный на МКС. Привод должен управлять скоростью разматывания троса, и после развёртывания троса привод должен по задан- ному закону подтягивать и отпускать трос. 2. Алгоритмы управления, реализующие пассивную одноосную гравитационную стабилизацию Международной космической станции. Моделирование основных динамических процессов, возникающих в гибкой связи при управлении ею, на имитационной модели Далее рассмотрим задачу обеспечения угловой ориентации в пло- скости тангажа, т. е. в плоскости, в которой происходит колебание тросовой системы. 2.2.1. Некоторые возможные схемы подвески троса к орбитальной системе На рис. 3 и 4 показаны возможные схемы подвески троса к орбитальной станции.
На рис. 3 трос в точке 3 крепится к растяжке из двух отрезков троса длиной с1 и с2. Сила натяжения направлена вдоль троса с3. Величина р1 — плечо, которое определяет момент силы, вращающий станцию. Управление угловым положением станции предлагается осуществлять соответствующим изменением величины этого момента. С этой целью можно, например, поставить привода в точках 1 и 2, которые должны подтягивать или отпускать отрезки тросов с1 и с2. Это тем более необходимо, ввиду того, что в процессе колебания тросовой системы вектор натяжения F изменяет свое направление. Так как точка подвеса троса расположена ниже центра масс станции, то угловой поворот вектора натяжения создает момент сил, вращающий станцию. Изменение длины отрезков с1 и с2, как показано на рис. 3, перемещает точку 3 крепления троса вдоль оси 0Хs.
На рис. 4 показана схема другого варианта крепления троса. Предлагается вдоль нижней поверхности станции перемещать управляемую тележку, к которой в точке 3 крепится трос. Тележка перемещается по поверхности станции по направляющим. Для управления угловым положением станции необходимо задать алгоритм управления движением тележки.
Заключение
Проведённое математическое моделирование процесса одноосной гравитационной стабилизации орбитальной системы показало, что управление положением точки подвеса троса с помощью предложенного в работе алгоритма управления в зависимости от величины натяжения троса, измеряемого специальным датчиком, установленным на грузе-терминале, показаний позиционно чувствительного детектора, установленного на Международной космической станции, и данных системы определения орбитальной ориентации, приводит к одноосной стабилизации орбитальной системы.
|
| Категория: Меоды ориентации и стабилизации | Добавил: Никс (28.02.2015)
|
| Просмотров: 837
| Рейтинг: 0.0/0 |
Добавлять комментарии могут только зарегистрированные пользователи. [ Регистрация | Вход ] |
|
|